



Uno de los requisitos para una correcta observación GNSS es tener cielo despejado para lograr un buen rastreo de las señales enviadas por los satélites. Este requisito pareciera ser una condición ineludible para GNSS, sin embargo, Trimble ha planteado mejoras significativas en el motor de procesamiento RTK para sus nuevos receptores GNSS.
En específico, ProPoint™ permite realizar posicionamiento RTK basándose en tres conceptos básicos:
⨭ Precisión: diferencia entre el valor verdadero y medido. Trimble ProPoint™ asegura que este valor será reducido.
⨭ Confiabilidad: certeza de la estimación de la varianza-covarianza en tiempo real. Es el criterio más importante dado que no siempre se conoce el valor verdadero.
⨭ Productividad: simplemente se trata de adquirir más puntos fijos por unidad de tiempo dado que el receptor optimiza la determinación de coordenadas. En términos prácticos esto significa más tiempo en donde la solución converge en grado topográfico con la correspondiente ganancia en productividad.
En rigor, estos tres conceptos se deben dar en conjunto gatillando que el trabajo en terreno sea lo más eficiente posible. Desde un punto de vista técnico, ProPoint™ no es nada más ni nada menos que un algoritmo disponible en los receptores Trimble que, a través de un procesamiento intensivo de todas las señales GNSS observadas, logra determinar coordenadas de grado topográfico incluso en lugares de difícil observación satelital.
Quizá el criterio más difícil de poder evaluar tiene que ver con la confiabilidad dado que se trata de una estimación de carácter probabilístico. Por ejemplo, en los sistemas GNSS convencionales que usan la técnica fijo/flotante no siempre alta confiabilidad significa precisión. Esto quiere decir que hay determinaciones de precisión que son extremadamente optimistas y que en la realidad ofrecen una amplia diferencia entre el valor verdadero y el valor observado. El motor de procesamiento ProPoint da muestras evidentes de haber superado aquello.
Para poner a prueba ProPoint™ se decidió realizar una experiencia de medición con un móvil Trimble DA2 recibiendo correcciones diferenciales desde una base GNSS Trimble R12i. El escenario escogido es un estero en donde existe una gran cobertura de vegetación que dificulta la observación satelital. La base Trimble R12i fue instalada en un punto de coordenadas conocidas para enviar correcciones diferenciales vía internet en formato CMRx el cual es capaz de manejar todas las constelaciones y señales GNSS disponibles.
Condiciones del lugar
Primero que todo, se escoge un lugar que presenta complicaciones para la observación satelital y que sea desafiante para el receptor en términos de la determinación de coordenadas en tiempo real. Por esta razón, se escoge un estero el cual no ha tenido limpieza, por lo cual, existe una cubierta densa de vegetación junto con grandes árboles por los costados que podrían provocar problemas en la observación satelital como lo indica la figura 1.

Figura 1. Condiciones del estero.
Productividad alcanzada
Se logra una representación topográfica de más de 3 km por medio de perfiles transversales cada 25 m determinados a través de Trimble DA2 recibiendo correcciones diferenciales desde una base Trimble R12i. Esta representación se llevó a cabo durante dos días a partir de instalaciones distintas para la base Trimble R12i que emitía correcciones diferenciales vía internet (ver noticia R12i como estación base por internet):

Figura 2. Levantamiento topográfico del estero.
De esta forma, se tienen los siguientes resultados:
|
Día |
21-mar-22 |
22-mar-22 |
|
Tiempo total |
5 horas 10 minutos |
3 horas 45 minutos |
|
Puntos levantados |
453 |
408 |
|
Tiempo por punto |
40 segundos |
33 segundos |
Tabla 1. Productividad alcanzada por Trimble DA2
Otra forma de representar la productividad es trazando gráficas que muestran la distribución de los puntos en el tiempo. A partir de estas gráficas se puede analizar que, prácticamente, no hay “tiempos muertos”:
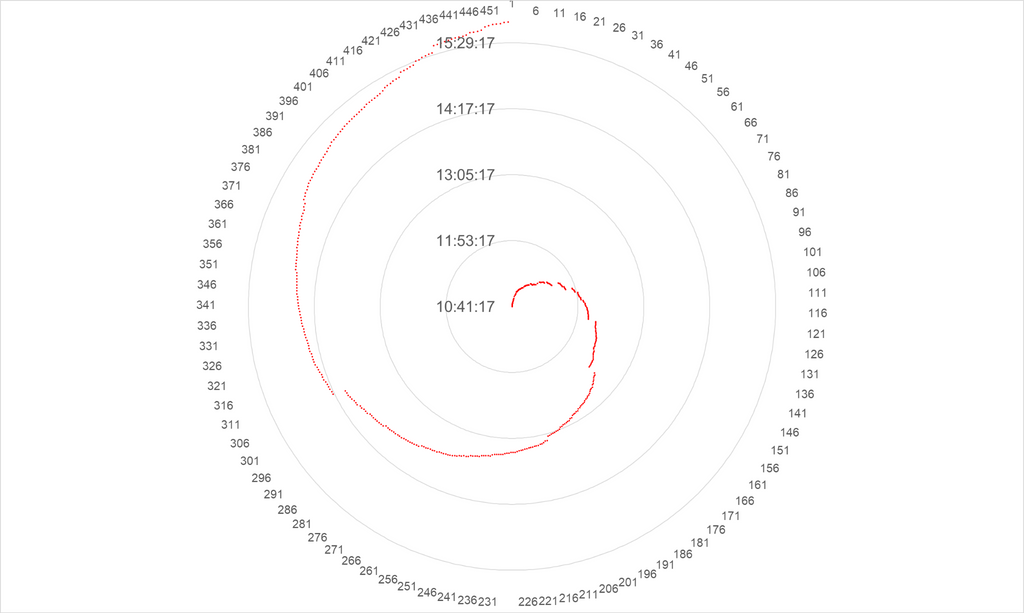
Figura 3. Distribución de puntos en el tiempo para el día 21-mar-22

Figura 4. Distribución de puntos en el tiempo para el día 22-mar-22
Confiabilidad
Ya se había indicado que la confiabilidad será evaluada en términos de la determinación de la varianza-covarianza proveniente del cálculo de coordenadas. Simplificando el análisis sólo se mostrará precisión horizontal, precisión vertical y número de satélites observados. En el caso de las precisiones, estas serán indicadas con un intervalo de confianza del 68% (1-sigma).
Para esto se tienen las figuras 5 y 6 donde se puede apreciar, a través de su distribución en el tiempo, en azul la precisión horizontal y en rojo la precisión vertical asociadas al eje de la izquierda que indica valores en metros. Por último, en verde se establece la cantidad de satélites relacionados con la determinación de coordenadas cuyos valores están indicados en el eje derecho:

Figura 5. Distribución de precisiones y satélites a través del tiempo para el día 21-mar-22

Figura 6. Distribución de precisiones y satélites a través del tiempo para el día 22-mar-22
Lo anterior es posible resumirlo en las siguientes estadísticas:
|
Día |
21-mar-22 |
22-mar-22 |
|
Precisión horizontal media |
0.021 ± 0.048 |
0.017 ± 0.039 |
|
Precisión vertical media |
0.037 ± 0.071 |
0.030 ± 0.059 |
|
Número medio de satélites |
16 ± 3 |
17 ± 3 |
Tabla 2. Resumen de precisión y cantidad de satélites
En términos del agrupamiento de las soluciones de acuerdo a su precisión horizontal se puede establecer lo siguiente:
|
Día |
21-mar-22 |
22-mar-22 |
|
Menos de 5 cm |
92.3% |
93.9% |
|
Entre 5 a 10 cm |
5.3% |
3.7% |
|
Más de 10 cm |
2.4% |
2.5% |
Tabla 3. Distribución de precisión horizontal
Precisión
Este es el elemento más difícil de evaluar ya que se necesita conocer el valor verdadero para poder contrastarlo con el valor determinado obteniendo lo que se conoce como error. En rigor, precisión se define como el grado de dispersión de una muestra, sin embargo, ya se ha convenido que es poco práctico definirlo de esta forma.
Para abordar este punto, se evaluará la relación de un punto de baja precisión junto con su vecindad. Se debe recordar, a partir de la tabla 3, que menos de un 2.5% de la muestra de puntos determinados tienen una precisión horizontal menor a 10 cm (19 puntos de un total de 856).
El levantamiento se ha desarrollado a través de perfiles transversales cada 25 m. Cada uno de los puntos que componen los perfiles relata una geometría en torno a su entorno. En el perfil 1 (figura 7) se tienen 7 puntos de los cuales sólo uno fue determinado con una confiabilidad más baja (0.396 m de precisión horizontal y 0.720 m de precisión vertical). Sin embargo, la forma esperada se mantiene sin alteración considerando la aplicación ante la cual responde la representación topográfica.

Figura 7. Perfil 1
En síntesis, ningún punto fue eliminado ya que todos lograron constituir una superficie que representa el estero de forma fidedigna. Lo mismo puede ratificarse para la figura 8.

Figura 8. Perfil 2
Compartir:
COLUMNA DE OPINIÓN | LiDAR RIEGL: Geocom a la vanguardia en proyectos mineros
Aplicando RTX con Trimble DA2