



INTRODUCCIÓN
La fotogrametría ha contribuido de gran forma en la adquisición de datos para la representación topográfica en variadas escalas. Claramente, los UAS (Sistemas Aéreos No Tripulados), más bien conocidos como drones, han sido el elemento central para dar fuerza a la fotogrametría pasando a convertirse, durante la última década, en una técnica muy usada en el ámbito de la representación topográfica.
En un principio, las ventajas de la fotogrametría estaban asociadas directamente a la productividad especialmente en el caso de los drones de ala fija. Luego, con la especialización de los multirrotores, la fotogrametría incide en ámbitos mucho más específicos logrando representaciones masivas de gran precisión. Por otra parte, las mejoras en las cámaras fotográficas digitales hacen un aporte considerable en la masificación de la fotogrametría.
Sin embargo, en términos de referenciación, la fotogrametría siempre ha necesitado de puntos de control para transformar las coordenadas del bloque aerotriangulado. Esto se conoce como referenciación indirecta, siendo una metodología ampliamente aplicada por una variedad de usuarios y que da conexión con técnicas convencionales de la topografía.
En este sentido, las coordenadas de los puntos de control, que deben ser fotoidentificables, se determinan mediante GNSS o estación total. No obstante, hay situaciones en donde no es posible medir puntos discretos debido a razones de acceso o seguridad.
También, hay algunos bloques de aerotriangulación que requieren de geometrías especiales de puntos de control ya sea por cambios altimétricos abruptos o por defectos geométricos de la planificación de vuelo.
En respuesta a lo anterior, la fotogrametría ha incorporado GNSS+IMU en la determinación de la pose de la cámara haciendo que la aerotriangulación se apoye directamente en estos valores, disminuyendo considerablemente la cantidad de puntos de control hasta, en algunos casos, prescindiendo por completo de ellos.
POSE DE LA CÁMARA
Antes de profundizar en la técnica de referenciación directa, es necesario comprender el concepto de pose de la cámara.
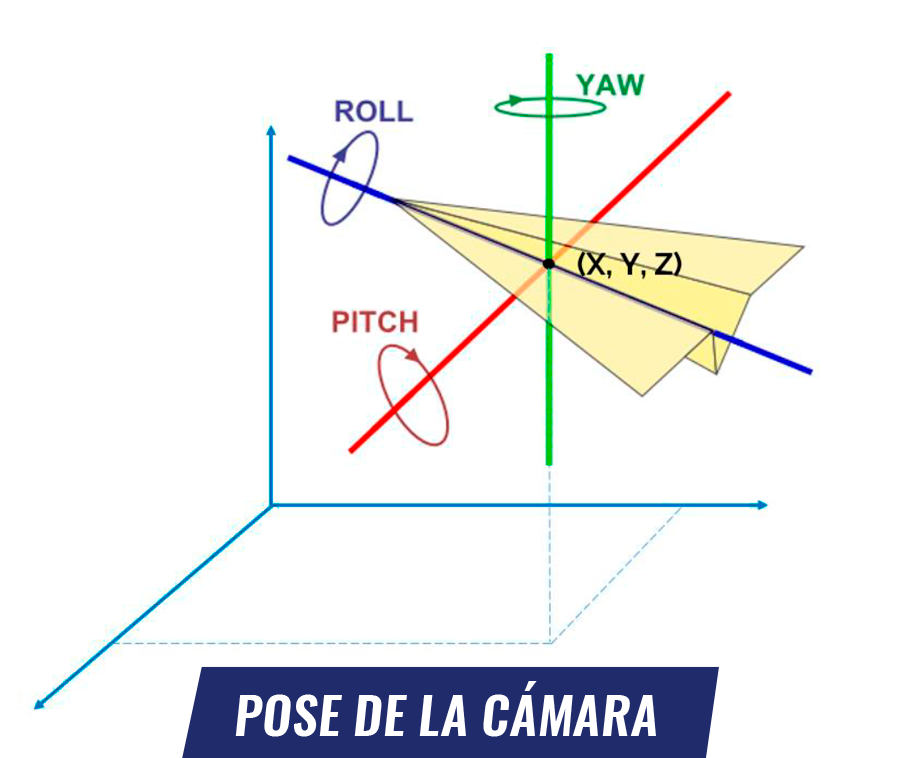
La fotogrametría está amparada directamente en la visión estereoscópica. Esto quiere decir que con un mínimo de 2 fotografías que capturan un área en común, es posible construir un modelo estereoscópico que permite simular el efecto de la profundidad. En otras palabras, la fotogrametría permite el cambio de una proyección bidimensional hacia una tridimensional.
Para lograr el modelo estereoscópico, las fotografías deben volver a la posición y orientación del momento de su captura. Esto se conoce como pose de la cámara y está dada por 6 parámetros: 3 coordenadas y 3 orientaciones dispuestas en el espacio tridimensional.
Ahora, una vez conseguida la pose de la cámara, que tiene una determinación arbitraria incluso con una escala no verdadera, es necesario posicionarla en un sistema de referencia conocido. Es aquí donde usualmente se usan puntos de control: simplemente se realiza una transformación de coordenadas usando estos puntos.
La variante que usa la referenciación directa consiste en determinar la pose de la cámara a través del procesamiento de observaciones GNSS+IMU sin necesidad de realizar la transformación de coordenadas antes mencionada.
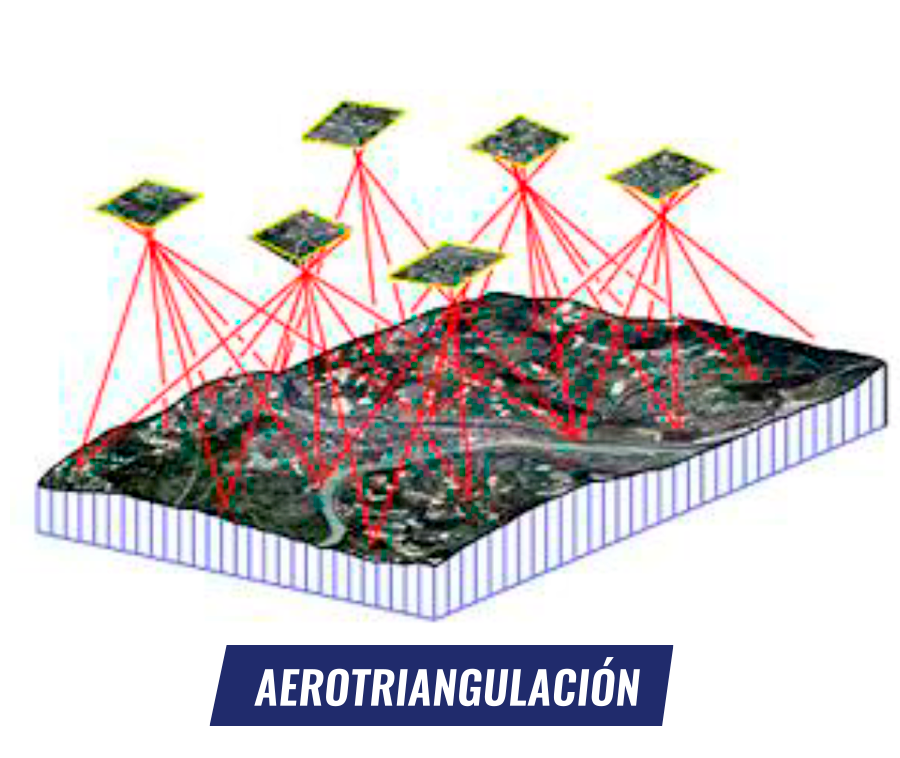
AEROTRIANGULACIÓN
Se conoce como aerotriangulación al proceso de la determinación de la pose de la cámara de las distintas fotografías que se han adquirido para un bloque específico. La aerotriangulación está basada en algoritmos avanzados de reconocimiento de imágenes que le permiten determinar de forma automática una multitud de puntos de paso (el mismo punto en diferentes fotografías) que permiten realizar un ajuste por mínimos cuadrados de las posiciones y orientaciones de las distintas fotografías.
REFERENCIACIÓN
Según lo anterior, se definen los siguientes tipos de referenciación:
● Referenciación indirecta: basada en la incorporación de puntos de control.
● Referenciación directa GNSS: basada en la determinación de las coordenadas de los puntos principales de las fotografías mientras que las orientaciones se obtienen del ajuste que realiza la aerotriangulación. En rigor, se trata de una aerotriangulación con una cantidad menor de incógnitas (sólo se desconocen las orientaciones).
● Referenciación directa completa: la pose de la cámara se determina de forma absoluta mediante una observación de GNSS+IMU. En el proceso fotogramétrico no es necesario realizar aerotriangulación.
GNSS: PPK vs RTK
Amplia es la discusión que se da hoy en día respecto a los beneficios de ambas técnicas. Mientras PPK requiere un procesamiento de observaciones posterior a la adquisición de los datos, RTK determina las coordenadas in situ.
No obstante, la metodología RTK requiere de un enlace radial sin interrupciones lo que puede provocar algunas fotografías sin posición precisa. Aun así, la técnica GNSS+IMU sólo se puede aplicar en posproceso.

UAS Y DRONES
En relación a los sistemas aéreos no tripulados, estos se clasifican en dos grandes tipos: ala fija y ala rotatoria. Cada uno de estos tiene sus respectivas ventajas y desventajas, las cuales son importantes conocer, para que, según las características que tenga el proyecto a realizar, se utilice el equipo más idóneo.
Ala fija
Son similares a una aeronave convencional, ya que poseen una estructura conocida, generalmente equipada por uno o dos motores. Sus ventajas son las siguientes:
● Aerodinámica más eficiente
● Mayor velocidad de desplazamiento
● Mayor superficie de levantamiento
● Mayor autonomía
● Mayor productividad

Ala rotatoria
Llamados también multirrotores, son aquellos equipos que poseen más de 2 motores. Sus ventajas son las siguientes:
● Despegue y aterrizaje vertical
● Ideal para espacios confinados
● Inspección visual (registro de video)
● Versatilidad de sensores
En este documento se revisarán los sistemas ala fija Delair UX11 y WingtraOne y los multirrotores DJI Phantom 4 RTK y Matrice 210 RTK V2. Todos estos sistemas cuentan con referenciación directa GNSS. También, se analizará el sistema Microdrones mdMapper1000DG el cual se encuentra equipado con referenciación directa completa (GNSS+IMU).
FLUJO DE TRABAJO USADO EN REFERENCIACIÓN DIRECTA
La referenciación directa permite la determinación propia de la pose de la cámara. Esto se realiza en base a observaciones GNSS o GNSS+IMU. Sin embargo, el flujo de trabajo en terreno no cambia significativamente respecto a los procesos de referenciación indirecta.
Primero, se necesita realizar la planificación de vuelo que es donde se define el trazado del área a levantar junto con la determinación de la altura de vuelo –que origina el tamaño del píxel proyectado sobre el terreno-, así como también traslape longitudinal y transversal de las fotografías y dirección de las líneas de vuelo (que en lo posible deben ser perpendiculares a la dirección del viento). El software de planificación a utilizar depende directamente del UAS, aunque son todos muy similares y permiten una planificación rápida y amigable.
 Dado que la referenciación directa requiere de procesamiento de líneas base GNSS, se requiere de la instalación de un receptor GNSS en un punto de coordenadas conocidas. El GNSS debe almacenar observaciones satelitales con una tasa de registro de 1 segundo, luego, se procede a la operación del equipo UAS, en donde se debe cumplir con una lista de chequeo la cual ayudará a una segura operación de vuelo.
Dado que la referenciación directa requiere de procesamiento de líneas base GNSS, se requiere de la instalación de un receptor GNSS en un punto de coordenadas conocidas. El GNSS debe almacenar observaciones satelitales con una tasa de registro de 1 segundo, luego, se procede a la operación del equipo UAS, en donde se debe cumplir con una lista de chequeo la cual ayudará a una segura operación de vuelo.
La referenciación directa obtiene como producto la pose de la cámara, ya sea de forma completa o incompleta. Esta determinación depende del procesamiento de observaciones GNSS o GNSS+IMU. Adicionalmente, para dotar de la posición precisa a cada punto principal de las fotografías, se debe establecer un nexo entre la cámara y el GNSS o GNSS+IMU. A esto se le conoce como interpolación de posiciones y se realiza en base al tiempo o a un marcador de eventos situado en el propio GNSS de la aeronave.
A continuación, se profundizará más en detalle sobre esto, entendiendo que existen equipos con referenciación directa incompleta, donde sólo se obtendrá la posición precisa (línea DJI, Delair y WingtraOne) y equipos con referenciación directa completa, donde se determinará no solo la posición, sino que también la orientación precisa (Microdrones mdMapper1000DG).
En los productos DJI Phantom RTK y Matrice 210 RTK V2, se recomienda procesar la trayectoria GNSS con el software Trimble Business Center que permite determinar las coordenadas de cada registro del GNSS (trayectoria de vuelo).
Una vez obtenida la trayectoria de vuelo, se necesita interpolar la posición exacta del evento. Es por esto que GEOCOM desarrolló la Aplicación GEOCOM-DJI, la cual asocia la trayectoria de vuelo precisa obtenida en TBC con el archivo de tiempo MRK de los eventos capturados por el multirrotor.

En el caso de los UAS de ala fija Delair UX11 y WingtraOne, para obtener las coordenadas precisas de las fotografías se utilizan los software Delair After Flight y WingtraHub, respectivamente. Ambos software se diferencian por su interfaz y por algunos detalles y utilidades, pero ambos hacen lo mismo: el procesamiento de la trayectoria precisa que siguió el avión.
El flujo de trabajo consiste en, primero importar los datos la base GNSS e indicar sus coordenadas; luego importar los datos almacenados en el avión (archivo GNSS y fotografías); posteriormente iniciar el procesamiento de líneas base GNSS; y finalmente obtener el geoetiquetado de las fotografías, lo cual va acompañado con un informe sobre la calidad del procesamiento PPK y las precisiones obtenidas.
Con Microdrones mdMapper1000DG, se realizará la obtención de la pose de la cámara completa (GNSS+IMU), para esto se utilizará POSPac UAV de Applanix. Este es un potente software de proceso para datos GNSS e inerciales, como también para la georreferenciación directa de fotografías obtenidas a partir de plataformas aéreas.
Su flujo de trabajo, es muy similar al realizado con los otros equipos con referenciación directa, es decir, se deberá crear un proyecto, definir un sistema de coordenadas, realizar la importación del archivo base (con una tasa de registro de 1 segundo) y la importación del archivo del dron, obteniendo mediante posproceso, la posición (en x,y,z) y la orientación (yaw, pitch y roll), revisando en todo momento la calidad de los datos de navegación.

Que la pose de la cámara se obtenga de forma completa, permite mayor versatilidad y productividad de operación, ya que, por ejemplo se podrán realizar vuelos lineales (con una o dos líneas, como se verá en el caso práctico presentado más adelante).
Finalmente, luego de terminado el proceso de referenciación directa en cualquiera de los equipos UAS mencionados anteriormente, viene el procesamiento fotogramétrico en Agisoft Metashape, que es un potente software que permite obtener los productos finales del levantamiento: nube de puntos y ortofoto.
Una nube de puntos es un conjunto de posiciones en un sistema de coordenadas tridimensional ideado para representar la superficie de un objeto. Por otro lado, una ortofoto es una fotografía con proyección ortogonal que es producto de la alineación de las múltiples fotografías capturadas. Ambos productos cuentan con referencia conocida obtenida a través del proceso de referenciación directa.
A partir de la nube de puntos y la ortofoto, se pueden generar un sinfín de nuevos productos, como superficies, curvas de nivel, cubicaciones, etc. El flujo de trabajo en Agisoft Metashape es el siguiente:
● Definición de sistema de coordenadas
● Importación de fotografías
● Importación de la pose la cámara
● Importación de calibración de cámara
● Alineación de fotografías (aerotriangulación)
● Reconstrucción densa (obtención de nube de puntos)
● Clasificación de nube de puntos
● Reconstrucción de superficie
● Obtención de ortofoto
● Delimitación del área de interés
● Exportación a una variedad de formatos
DJI PHANTOM 4 RTK
Este multirrotor es un equipo muy liviano y sencillo de operar, con un flujo de trabajo muy intuitivo para el usuario.
El dron está equipado con una cámara integrada de 20 MP con un tamaño de sensor de 1’’. Su confección aerodinámica permite una resistencia al viento de 36 km/h, entregando además una operación muy versátil al estar preparado para volar hasta los 6000 m sobre el nivel medio del mar.
El caso práctico realizado con Phantom 4 RTK se ejecutó en un puerto del norte de Chile. El levantamiento tenía como objetivo identificar la línea de costa del borde costero, para luego materializarla con fines de ingeniería portuaria. Algunos antecedentes de los vuelos realizados:

Luego de realizar el procesamiento y con el objetivo de validar la precisión del levantamiento, se midieron 5 puntos de chequeo (aquellos que no intervienen en la aerotriangulación) instalados en zonas fácilmente identificables, como vértices de caminos y veredas.

A continuación, las diferencias encontradas en la componente horizontal y vertical:

En fotogrametría, el error está directamente asociado a la altura de vuelo, consiguiendo una determinada resolución de la fotografía, es decir, a menor altura se espera una precisión mayor que si se realizan los vuelos más altos (a igual resolución del sensor fotográfico). En la componente horizontal el error se espera que sea de 1-2 píxeles, mientras que de 2-3 píxeles para la componente vertical. En este levantamiento, como la resolución promedio fue de 5 cm, el error promedio es aceptable para el objetivo del levantamiento.

El procesamiento fotogramétrico, realizado en Agisoft Metashape, permitió conseguir una ortofoto de alta resolución para la identificación del borde costero, así como también una superficie tridimensional texturizada para conocer la altura de cada elemento.
DJI MATRICE 210 RTK V2
La principal virtud del Matrice 210 RTK V2 es su capacidad para transportar una amplia variedad de sensores (cámaras fotográficas, sensores multiespectrales, sensores termales, entre otros). Además, cuenta con la tecnología GNSS de alta precisión la que permite realizar levantamientos fotogramétricos con referenciación directa lo que hace prescindir de puntos de control. Su confección aerodinámica permite una resistencia al viento de 43 km/h.
La cámara que se utiliza para fotogrametría es la Zenmuse X7, la cual cuenta con un sensor APS-C con resolución de 24 MP y distancia focal de 24 mm.
El caso práctico se realizó en una cuesta del norte de Chile, donde se capturaron 731 fotografías en un área de 400 Há. El levantamiento tenía como objetivo obtener una representación topográfica base para el diseño de un camino de alta montaña.
La experiencia práctica comienza realizando la planificación y operación de 6 vuelos escalonados con el fin de poder mantener un píxel proyectado constante a lo largo de todo el proyecto, esto se materializó físicamente despegando de 6 puntos distintos en terreno con distintas elevaciones, debido a que el proyecto cuenta con un desnivel de 1100 metros. A continuación se muestra una tabla con los principales parámetros del proyecto:

En esta experiencia se trabaja con una base GNSS Trimble R10 instalada en un punto de coordenadas conocidas. Respecto a la operación de vuelo, se despegó desde 6 puntos distintos con el fin de resguardar la productividad y la precisión de los productos fotogramétricos.

El procesamiento cinemático en posproceso de la trayectoria de vuelo, realizado en Trimble Business Center, consideró los siguientes parámetros:


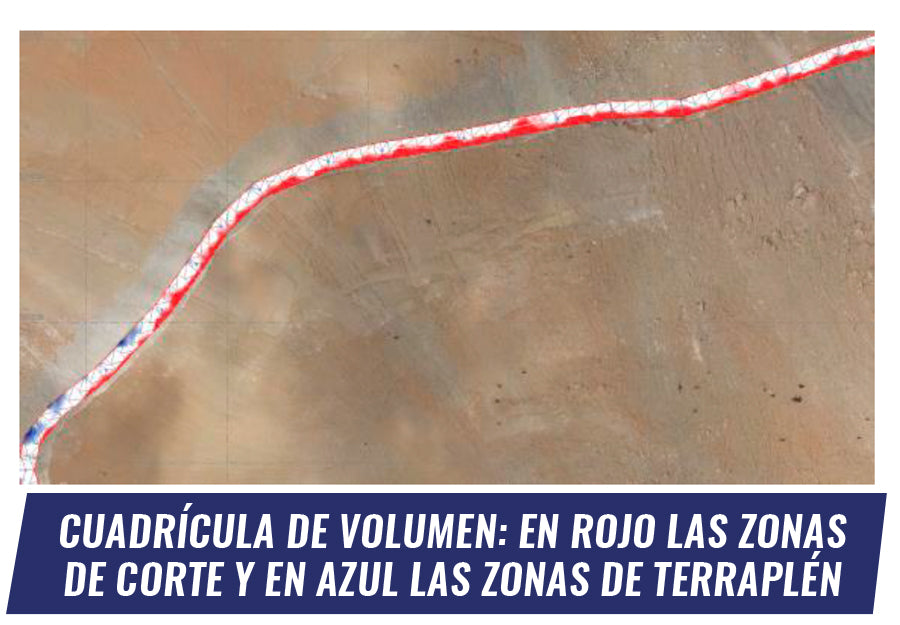
A partir de los productos fotogramétricos obtenidos en Agisoft Metashape, se diseñó un corredor en Trimble Business Center y se obtuvo un informe de movimiento de tierra.

Se diseñó un corredor con una plantilla tipo de 6 metros de ancho, esto con el fin de poder estimar el movimiento de tierra que se generará para ensanchar el camino existente.
DELAIR UX11
El ala fija Delair UX11 entrega una solución avanzada de fotogrametría. Su diseño aerodinámico le permite volar 59 minutos y cubrir grandes extensiones de superficie resistiendo vientos de hasta 45 km/h.
El Delair UX11 puede despegar hasta los 5000 m sobre el nivel medio del mar, lo que lo hace ideal para trabajos en gran altitud. Además, su cámara de 21.4 MP y lente de 12 mm, cuenta con un obturador global el cual elimina las distorsiones ópticas producidas por el movimiento de la aeronave.
El caso práctico se realizó en una línea férrea donde se adquirieron 400 fotografías en una superficie de 45 Há. El levantamiento tenía como objetivo generar una ortofoto con un alto nivel de detalle con fines de ingeniería ferroviaria.

|
Superficie |
45 há |
|
Vuelos |
1 |
|
Altura de vuelo |
210 m |
|
GSD |
3 cm |
|
Número de fotografías |
400 |
Delair UX11 responde a un ala fija del tipo BTOL que quiere decir Birdlike Takeoff and Landing, es decir, despega y aterriza como un pájaro. El despegue simplemente se realiza con un lanzamiento impulsado por las manos del operador mientras que para el aterrizaje se requiere de un espacio reducido.

El procesamiento de la trayectoria de vuelo se realizó en el software Delair After Flight, y luego el procesamiento fotogramétrico en Agisoft Metashape.


La ortofoto generada permitirá actualizar la planimetría de la línea férrea. Esta digitalización se realiza en Trimble Business Center, donde se utilizan sus funcionalidades de dibujo CAD avanzado.
WINGTRAONE
WingtraOne es un ala fija desarrollado en Suiza, y que específicamente responde a un VTOL (Vertical Take off and Landing). WingtraOne es un equipo que posee todas las cualidades de un ala fija, pero que despega y aterriza verticalmente, lo que genera un nulo desgaste del fuselaje. Este bimotor tiene una autonomía de 55 minutos y pesa 3.7 kilos. Otra de las grandes virtudes de este sistema, es que posee una potente cámara de 42 MP con sensor full-frame que permite volar a una mayor altura sin sacrificar precisión.
El caso práctico realizado con el WingtraOne se ejecutó en Peñaflor. El levantamiento tenía como objetivo realizar el levantamiento de un camino.
Para esto, el programa de planificación de vuelo, WingtraPilot permite planificar corredores (vuelo lineal), lo que facilita bastante el trabajo, ya que permite una cobertura rápida y eficiente de tramos largos y estrechos con la cámara SONY RX1RII,
Algunas aplicaciones interesantes en el diseño de corredores:
- Construcción de carreteras, inspección o mantenimiento
- Seguimiento e inspección de vías férreas
- Inspección de tuberías y líneas eléctricas
- Investigación ambiental, por ejemplo, mapeo de ríos

El aspecto de productividad es el elemento diferenciador en WingtraOne: en un sólo vuelo se pueden abarcar de 6 a 8 km (BVLOS, sin visual directa) y de 2 a 3 km (VLOS, con visual directa).
Algunos antecedentes del vuelo realizado:
|
Superficie |
20 há |
|
Vuelos |
1 |
|
Altura de vuelo |
150 m |
|
GSD |
1.9 cm |
|
Número de fotografías |
50 |
Parámetros del levantamiento fotogramétrico para un camino
La operación de vuelo comienza definiendo la base GNSS, en este caso se vinculó a la red GNSS GEOCOM.
Una vez realizado el vuelo, WingtraHub permite el proceso de la trayectoria de vuelo obteniendo las posiciones precisas de las fotografías en formato CSV o geoetiquetando la fotografía.
El procesamiento fotogramétrico fue realizado con Agisoft Metashape. Con estos productos, se trabajó posteriormente con Trimble Business Center, donde se dibujó el camino en base a sus herramientas CAD. Con esto se lograr generar un corredor.


El producto final generado corresponde a un plano topográfico, el cual entregará información relevante mediante perfiles transversales y longitudinales del levantamiento:

MDMAPPER1000DG
El sistema mdMapper1000DG es un potente y robusto Multirrotor de la empresa alemana Microdrones. Tiene una autonomía de 40 minutos, soporta vientos de hasta 43 Km/h y puede trabajar hasta los 4.500 msnm. Su material es de carbono y viene equipado con una cámara Sony RX1RII de 42 MP y sensor full-frame.
Este es un equipo con referenciación directa completa, en donde la pose de la cámara se determina de forma absoluta mediante una observación de GNSS+IMU (posición + orientación). Lo anterior permite que el bloque levantado no sea sensible a la geometría del levantamiento (o al menos no tanto), ya que en el proceso fotogramétrico no es necesario realizar aerotriangulación. Esto hace que el mdMapper1000DG sea el equipo ideal para la realización de una trayectoria lineal con sólo dos líneas de vuelo, lo cual es muy complejo de realizar con equipos con referenciación directa GNSS (en donde se recomiendan 4 líneas de vuelo para la obtención de resultados precisos).
El IMU incorporado es un Applanix APX-15, desarrollada por Trimble, y corresponde a una placa integrada que contiene un GNSS y una IMU (Unidad de Medición Inercial), ambos de alta precisión.

La aplicación óptima de este equipo se enfoca en proyectos lineales y de infraestructura, los cuales por planificación de vuelo son muy difíciles de realizar con otros equipos.
El caso práctico que se mostrará con este sistema fue un levantamiento fotogramétrico realizado en el muro del Tranque Talabre de Codelco, el cual se encuentra ubicado a una altitud geográfica de 2470 m sobre el nivel medio del mar.

|
Longitud del corredor |
4 km |
|
Superficie |
86 Há |
|
Altura de vuelo |
120 m |
|
GSD |
2 cm |
|
Número de fotografías |
478 |
Parámetros del levantamiento fotogramétrico del muro del tranque
Una vez finalizado el levantamiento fotogramétrico, se realizó el procesamiento de la trayectoria de vuelo a través del software POSPac UAV. El resultado de este proceso es la pose completa de la cámara a través de un proceso ligado al marcador de eventos del sensor inercial; la cámara al momento de obturar transmite un evento al sensor inercial el cual conoce a través del tiempo GPS.

Una vez obtenida las coordenadas y orientaciones precisas, el procesamiento fotogramétrico se realizó en Agisoft Metashape. La única diferencia en este proceso tiene que ver con la incorporación directa la pose de la cámara. La aerotriangulación ya no es necesaria, debido a que los 6 parámetros de la orientación externa de la cámara son conocidos.
.
Para este vuelo, se midieron 5 puntos de chequeo, los cuales sirvieron para validar el levantamiento. A continuación, los resultados de los puntos de chequeo medidos:
|
ID |
Dif. Hor. (m) |
Dif. Ver. (m) |
|
PC 1 |
0.071 |
0.094 |
|
PC 2 |
0.032 |
0.043 |
|
PC 3 |
0.047 |
0.080 |
|
PC 4 |
0.063 |
0.006 |
|
PC 5 |
0.059 |
0.073 |
|
Promedio |
0.054 |
0.059 |
Error horizontal y vertical en puntos de chequeo

La referencia directa en fotogrametría ha planteado un nuevo nivel de productividad en comparación con la metodología que requiere del uso de puntos de control. No obstante, es una técnica que necesita de especialización por parte de quienes la aplican. Fuera de los conocimientos en cuanto a fotogrametría, se requieren destrezas en el ámbito del procesamiento de líneas base GNSS, además de entender el funcionamiento de sensores inerciales junto con su procesamiento.
Poder prescindir del uso de puntos de control terrestre permite optimizar considerablemente los recursos de tiempo y costos asociados al trabajo en terreno. Los ejemplos desarrollados en este documento y el análisis de sus resultados, permiten concluir que la técnica de referenciación directa en fotogrametría es confiable y entrega resultados precisos, pero se debe considerar siempre una metodología de trabajo correcta para conseguirlos.
Desarrollado por | Óscar Moreno, Hernán Álvarez, Cristián Michell, Ariel Silva | UAS y Drones, GEOCOM
Compartir:
Participación en la revista nueva minería y energía
Reapertura casa matriz GEOCOM